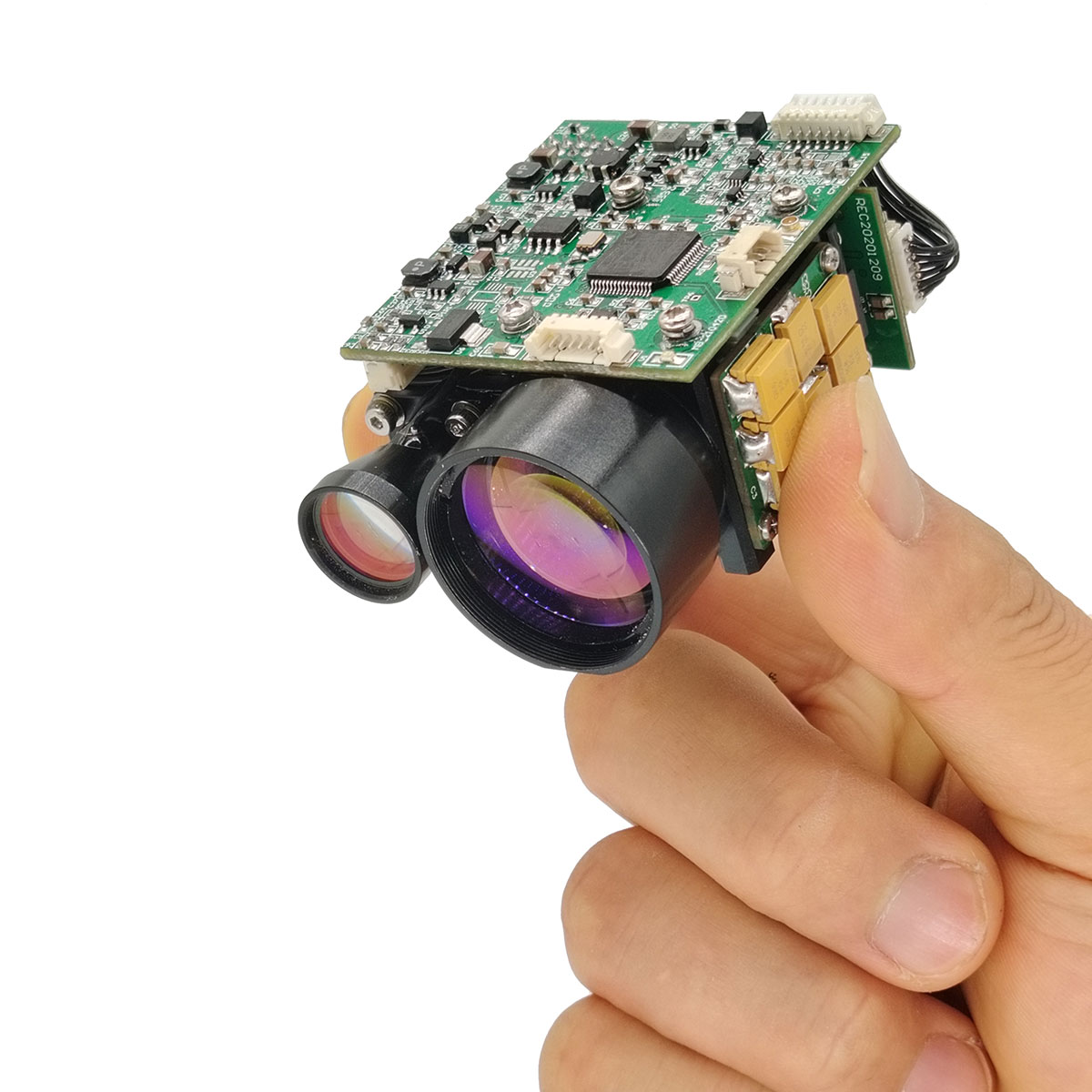
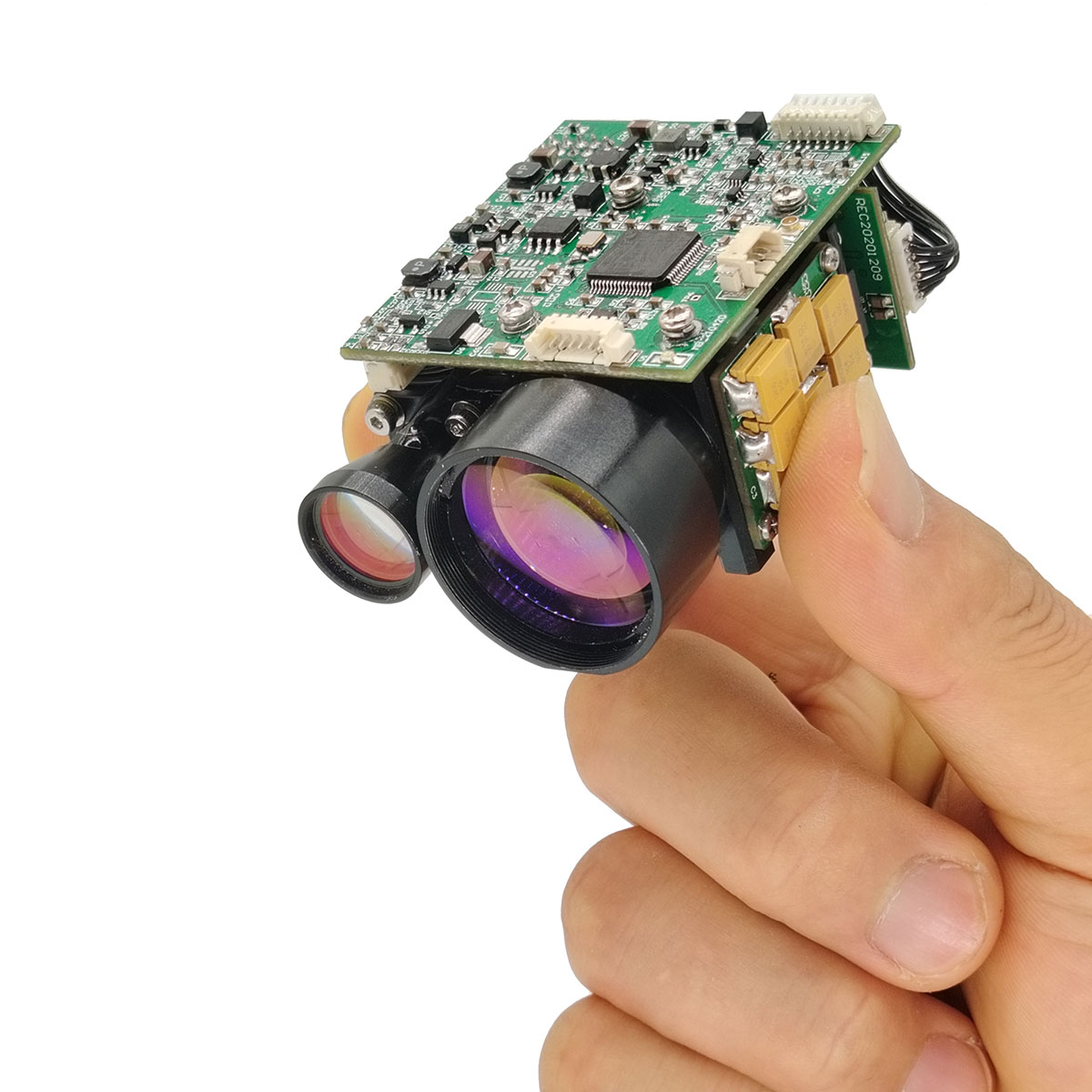
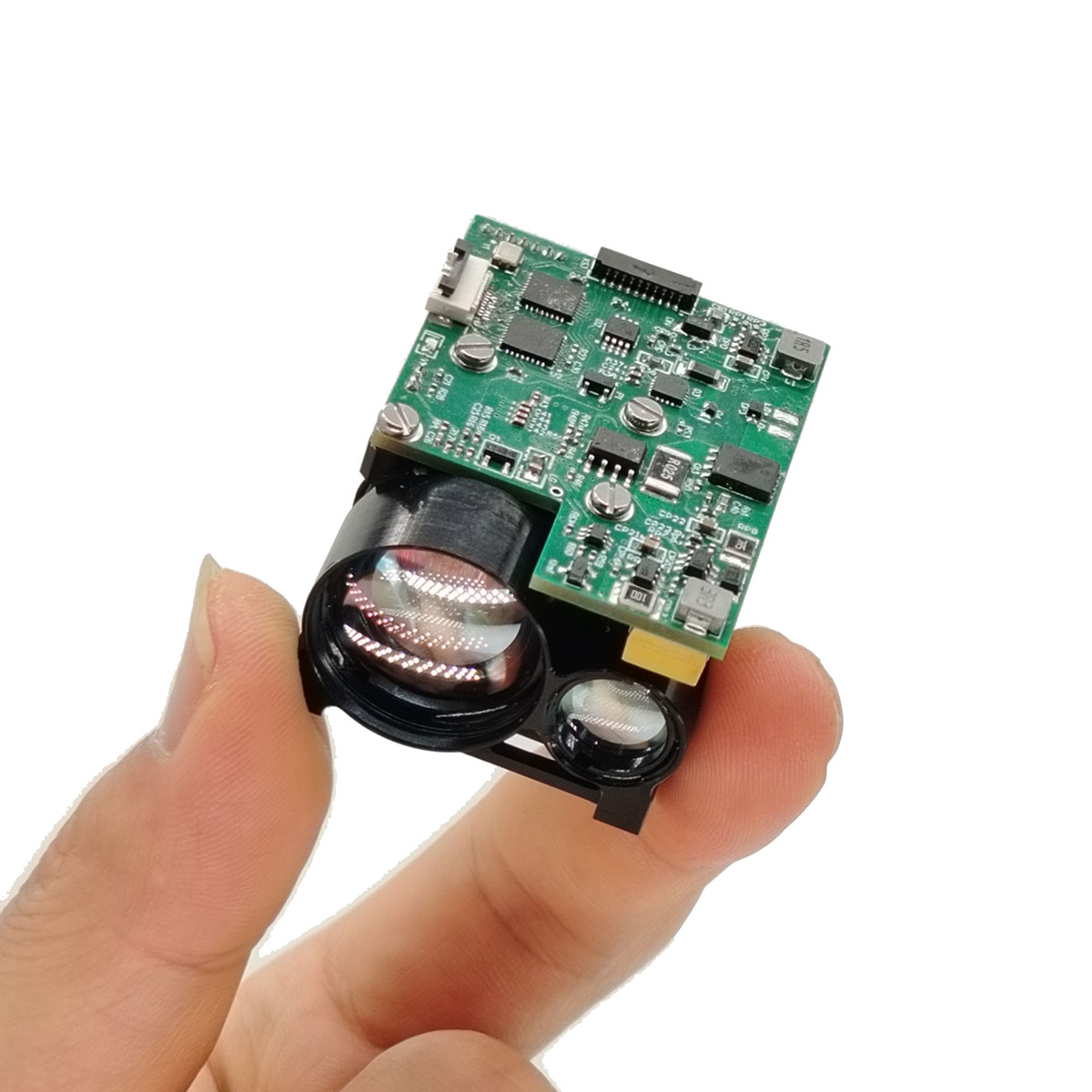
● Como fabricante profesional, nos gustaría ofrecerle un módulo de telémetro láser de seguridad ocular de 20 km. El módulo de telémetro láser STA-C2030X adopta un componente láser de vidrio de erbio de desarrollo propio de 1535 nm, que tiene las características de largo alcance, bajo consumo de energía, tamaño pequeño y seguridad para los ojos humanos.
● Rendimiento del alcance: 20.000 m (objetivo OTAN), 30.000 m (alcance máximo)
● Precisión de alcance ± 1 m
● Precisión de medición ≥ 98%
● Peso ≤ 380 g
El módulo telémetro láser de seguridad ocular STA-C2030X de 20 km presenta un diseño seguro, construcción liviana, consumo de energía reducido, vida útil prolongada y un amplio rango de temperaturas. Ampliamente utilizado en tareas como reconocimiento, topografía y cartografía, este módulo de telémetro láser carece de carcasa pero proporciona una amplia gama de interfaces para una integración sencilla en diversos sistemas. Los usuarios se benefician de la comodidad del software de PC y los protocolos de comunicación, lo que mejora la usabilidad de dispositivos portátiles y sistemas multifuncionales.
Alcance de disparo único y alcance continuo
Detección de 3 objetivos, indicación de objetivo frontal y posterior
Contiene función de autocomprobación
Función Wake-on-lan
Número de pulsos emitidos durante MNBF ≥1×106 veces
Dispositivos portátiles
Vehículo aéreo no tripulado
Vaina electroóptica
Vigilancia fronteriza
| Proyecto | Indicadores de desempeño | |
| Modelo | STA-C2030X | |
| Longitud de onda láser | 1535±5nm | |
| Seguridad ocular | Clase Ⅰ (IEC 60825-1) | |
| Ángulo de divergencia | ≤0,3 mrad | |
| Campo de visión de recepción (FOV) | ~ 1,8 mrad | |
| Diámetro de la lente de lanzamiento | Φ18mm | |
| Diámetro de la lente del receptor | Φ60mm | |
| Rango de medición (reflectancia 30%; visibilidad ≥28 km) | Rango MÁXIMO | ≥30000m |
| Gran objetivo | ≥23000m | |
| Objetivo de la OTAN | ≥20000m | |
| Personas (0,5 mx 1,7 m) | ≥11000m | |
| Vehículo aéreo no tripulado (0,2x0,3 m) | ≥4000m | |
| Rango mínimo | 50 metros | |
| Frecuencia de rango | 0,5 ~ 10Hz | |
| Precisión de rango | ±1metro | |
| Resolución de rango | ≤30metros | |
| Tasa de precisión | ≥98% | |
| Tasa de falsas alarmas | ≤1% | |
| Número de detecciones de múltiples objetivos | Hasta 3 objetivos | |
| Interfaz eléctrica | molex- 532610771 | |
| Tensión de alimentación | 12 V CC. | |
| Consumo de energía en espera | ≤1,2W | |
| Consumo medio de energía | ≤2W | |
| Consumo máximo de energía | ≤3W | |
| Peso | ≤380g | |
| Dimensión (largo x ancho x alto) | 125 mm × 100 mm × 70 mm | |
| Temperatura de funcionamiento | -40~+70 ℃ | |
| Temperatura de almacenamiento | -55~+75 ℃ | |
| Resistencia al impacto | 1200 g/1 ms( GJB150. 16A-2009) | |
| Antivibración | 5~50~5 Hz, rango de 1 octava/min, 2,5 g | |
| Lógica de rango | Primer y último objetivo, alcance multiobjetivo, selectividad de distancia | |
| Tiempo de activación | ≤950 ms | |
| Interfaz de datos | RS422 | |
| Aislamiento eléctrico | Aislamiento de tierra de energía, tierra de comunicación y tierra de estructura. | |
| Fiabilidad | MTBF ≥ 1500h | |
| Estabilidad del eje óptico | ≤0,05 mrad | |
| No paralelismo entre el eje óptico y la superficie de montaje | ≤0,5 mrad | |
| Clase de protección | IP67 | |
| Clase ESD | (Posición de la lente) Descarga por contacto 6kV Descarga por aire 8kV |
|
| Compatibilidad electromagnética (CEM) | Certificación CE/FCC | |
| Respetuoso del medio ambiente | RoHS2.0 | |

Modelo de conector eléctrico: J30J; Los enchufes y cables correspondientes serán proporcionados por la Parte B. La definición detallada de interfaces eléctricas se muestra en la siguiente tabla:
Tabla 1 Definición de interfaz
| Alfiler | Definición |
| 1 | Tierra |
| 2 | Tierra |
| 3 | Tierra |
| 4 | VCC 12V |
| 5 | VCC 12V |
| 6 | RS422 RX+ |
| 7 | RS422 RX- |
| 8 | RS422 TX- |
| 9 | RS422 TX+ |
La transmisión de datos entre el telémetro y la computadora superior incluye lo siguiente:
Comandos de control: incluida la medición de distancia inicial, medición de distancia continua, medición de distancia única, comandos de consulta, etc.
Datos de retorno: incluida información de distancia, temperatura ambiente, estado del telémetro, etc. El intercambio de datos entre el telémetro y la computadora superior adopta el bus 422. El protocolo de comunicación de software específico es el siguiente:
Formato de comunicación: comunicación RS422, velocidad en baudios 115200bps;
Formato de datos: datos de 8 bits, un bit de inicio, un bit de parada, sin verificación de paridad. Los datos constan de un byte de encabezado, una parte de comando, una longitud de datos, una parte de parámetro y un byte de suma de verificación.
Método de comunicación: el control maestro y el telémetro adoptan un método de comunicación maestro-esclavo. El control maestro envía comandos de control al telémetro, y el telémetro recibe y ejecuta los comandos. En el estado de alcance, el telémetro envía los datos y el estado del telémetro a la computadora superior de acuerdo con el ciclo de alcance. El formato de comunicación y el contenido del comando se muestran en la siguiente tabla.
Envío maestro
El formato del mensaje enviado es el siguiente:
| STX0 | CMD | LEN | DATOS1H | DATOS1L | CHK |
Enviar descripción del formato del mensaje
Tabla 2 Descripción del formato de envío de mensajes
| No. | Nombre | ilustrar | Código | Observación |
| 1 | STX0 | Bandera de inicio de mensaje | 55(H) | |
| 2 | CMD | Palabra de comando | Ver tabla 3 | |
| 3 | LEN | Longitud de datos | El número de todos los bytes excepto el indicador de inicio, la palabra de comando y la suma de verificación. | |
| 4 | DATOS | parámetro | ||
| 5 | llegada | |||
| 6 | CHK | verificación XOR | Excepto el byte de validación, los demás bytes se someten a operación XOR. |
El comando se describe a continuación:
Tabla 3 Descripción de comandos y palabras de datos enviadas por el control principal a la máquina medidora de distancia
| No. | Palabra de comando | Funciones | Byte de datos | Observaciones | Longitud | código de muestra (informática) |
| 1 | 0x00 | Apoyar (parada de alcance continuo) |
DATOS=00(H) DATOS=00(H) | Distancia medición la maquina deja de funcionar |
6 bytes | 55 00 02 00 00 57 |
| 2 | 0x01 | Rango único | DATOS=00(H) DATOS=00(H) | 6 bytes | 55 01 02 00 00 56 | |
| 3 | 0x02 | Rango continuo | DATOS=XX(H) DATOS=AA(H) | DATOS expresa el período de alcance en ms. |
6 bytes | 55 02 02 03 E8 BE (rango de 1Hz) |
| 4 | 0x03 | Autoprueba | DATOS=00(H) DATOS=00(H) | 6 bytes | 55 03 02 00 00 54 | |
| 5 | 0x04 | Selección de distancia y más cercano ajuste de distancia |
DATOS=XX(H) DATOS=AA(H) | DATOS expresa la zona ciega valor, unidad 1m |
6 bytes | 55 04 02 00 64 37 (100m más cercano) |
| 6 | 0x06 | Acumulativo número de consultas de luz apagada |
DATOS=00(H) DATOS=00(H) | Acumulativo número de consultas de luz apagada |
6 bytes | 55 06 02 00 00 51 |
| 7 | 0x11 | Encendido del APD | DATOS=00(H) DATOS=00(H) | 6 bytes | 55 11 02 00 00 46 | |
| 8 | 0x12 | APD apagado | DATOS=00(H) DATOS=00(H) | 6 bytes | 55 12 02 00 00 45 | |
| 9 | 0xEB | Consulta de número | DATOS=00(H) DATOS=00(H) | 6 bytes | 55 EB 02 00 00 aC |
l Formato de recepción maestra
El formato del mensaje de recepción es el siguiente:
| STX0 | CMD | LEN | DATOS | FECHA0 | CHK |
Tabla 4 Descripción del formato del mensaje de recepción
| No. | Nombre | Descripción | Código | Observaciones |
| 1 | STX0 | Bandera de inicio de mensaje 1 | 55(H) | |
| 2 | CMD_JG | Palabra de comando de datos | Ver Tabla 5 | |
| 3 | LEN | Longitud de datos | Número de todos los bytes excepto el indicador de inicio, la palabra de comando y la suma de verificación | |
| 4 | Dn | Parámetro | Ver Tabla 5 | |
| 5 | D0 | |||
| 6 | CHK | Suma de comprobación | Todos los bytes excepto el byte de paridad |
Descripción del estado de recepción principal:
Tabla 5 Descripción de la palabra de datos enviada desde el buscador de recorridos al control maestro
| No. | palabra de comando | Funciones | Byte de datos | Observaciones | longitud total | ||
| 1 | 0x00 | En espera (parada de rango continuo) | D1=00(H) D0=00(H) | 6 bytes | |||
| 2 | 0x03 | Autoprueba | D7 ~D0 | D0: tipo char, indica temperatura APD en grados Celsius; D1: valor de alto voltaje APD, unidad V; D3-D2: valor ciego, unidad 1m D5-D4: voltaje de -5 V, unidad 0,01 V. D7-D6: voltaje de +5V, unidad 0,01V |
12 bytes | ||
| 3 | 0x04 | Configuración de la distancia más cercana al opt-in, unidad m | D1 D0 | DATOS expresa el valor de la distancia más cercana en 1 m; Primero alto luego bajo |
6 bytes | ||
| 4 | 0x06 | Número acumulado de consultas de apagado | D3~D0 | DATOS expresa el número de veces que se emite la luz, 4 bytes, el byte alto es primero | 8 bytes | ||
| 5 | 0x11 | Encendido del APD | DATOS=00(H) DATOS=00(H) | APD con alto voltaje | 6 bytes | ||
| 6 | 0x12 | APD apagado | DATOS=00(H) DATOS=00(H) | APD sin alto voltaje | 6 bytes | ||
| 7 | 0xED | tiempo de espera de trabajo | 0x00 0x00 | El láser está protegido contra láser y no puede medir la distancia. | 6 bytes | ||
| 8 | 0xEE | Error de validación | 0x00 0x00 | 6 bytes | |||
| 9 | 0XEF | Tiempo de espera de comunicación en serie | 0x00 0x00 | 6 bytes | |||
| 10 | 0x01 | Medición de distancia única | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 primera distancia objetivo (unidad 0, 1 m) Distancia del segundo objetivo D5-D3 (los datos son 0 cuando el objetivo es único) (unidad 0, 1 m) Distancia del tercer objetivo D2-D0 (los datos son 0 cuando es un solo objetivo) (unidad 0, 1 m) 3 destino de cerca a lejos D9 (bit7-bit0) byte de bandera: D9 bit 7 indica onda principal; 1: con onda principal, 0: sin onda principal. D9 bit 6 indica onda de retorno; 1: con onda de retorno, 0: sin onda de retorno D9 bit 5 indica el estado del láser; 1: láser normal, 0: fallo del láser D9 bit 4 alarma de tiempo de espera; 1 normal, 0 tiempo de espera D9 bit 3 no válido, = 1 D9 bit 2 indica el estado de APD; 1: normal, 0: error D9 bit 1 indica si hay un ex objetivo; 1: objetivo, 0: sin objetivo (el objetivo antes el objetivo principal es el objetivo anterior) D9 bit 0 indica si hay un post- objetivo; 1: con objetivo, 0: sin objetivo (el El objetivo después del objetivo principal es el objetivo posterior) |
14 bytes | ||
| 11 | 0x02 | Medición continua de distancia | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 primera distancia objetivo (unidad 0, 1 m) Distancia del segundo objetivo D5-D3 (los datos son 0 cuando el objetivo es único) (unidad 0, 1 m) Distancia del tercer objetivo D2-D0 (los datos son 0 cuando es un solo objetivo) (unidad 0, 1 m) 3 destino de cerca a lejos D9 (bit7-bit0) byte de bandera: D9 bit 7 indica onda principal; 1: con onda principal, 0: sin onda principal. D9 bit 6 indica onda de retorno; 1: con onda de retorno, 0: sin onda de retorno D9 bit 5 indica el estado del láser; 1: láser normal, 0: fallo del láser D9 bit 4 alarma de tiempo de espera; 1 normal, 0 tiempo de espera D9 bit 3 no válido, = 1 D9 bit 2 indica el estado de APD; 1: normal, 0: error D9 bit 1 indica si hay un ex objetivo; 1: objetivo, 0: sin objetivo (el objetivo antes del objetivo principal es el objetivo anterior) D9 bit 0 indica si hay un post- objetivo; 1: con objetivo, 0: sin objetivo (el El objetivo después del objetivo principal es el objetivo posterior) |
14 bytes | ||
| 14 | 0xEB | Búsqueda de números | D16 … … D0 | D15 D12 Modelo completo D11 D10 Número de producto D9 D6 Versión de software D5 D4 Número de APD D3 D2 Número de láser D1 D0 Versión FPGA |
20 bytes | ||
| Observaciones: ① Byte/bit de datos no definidos, el valor predeterminado es 0; | |||||||
Para obtener más información sobre nuestros productos, comuníquese con Jioptik.